|
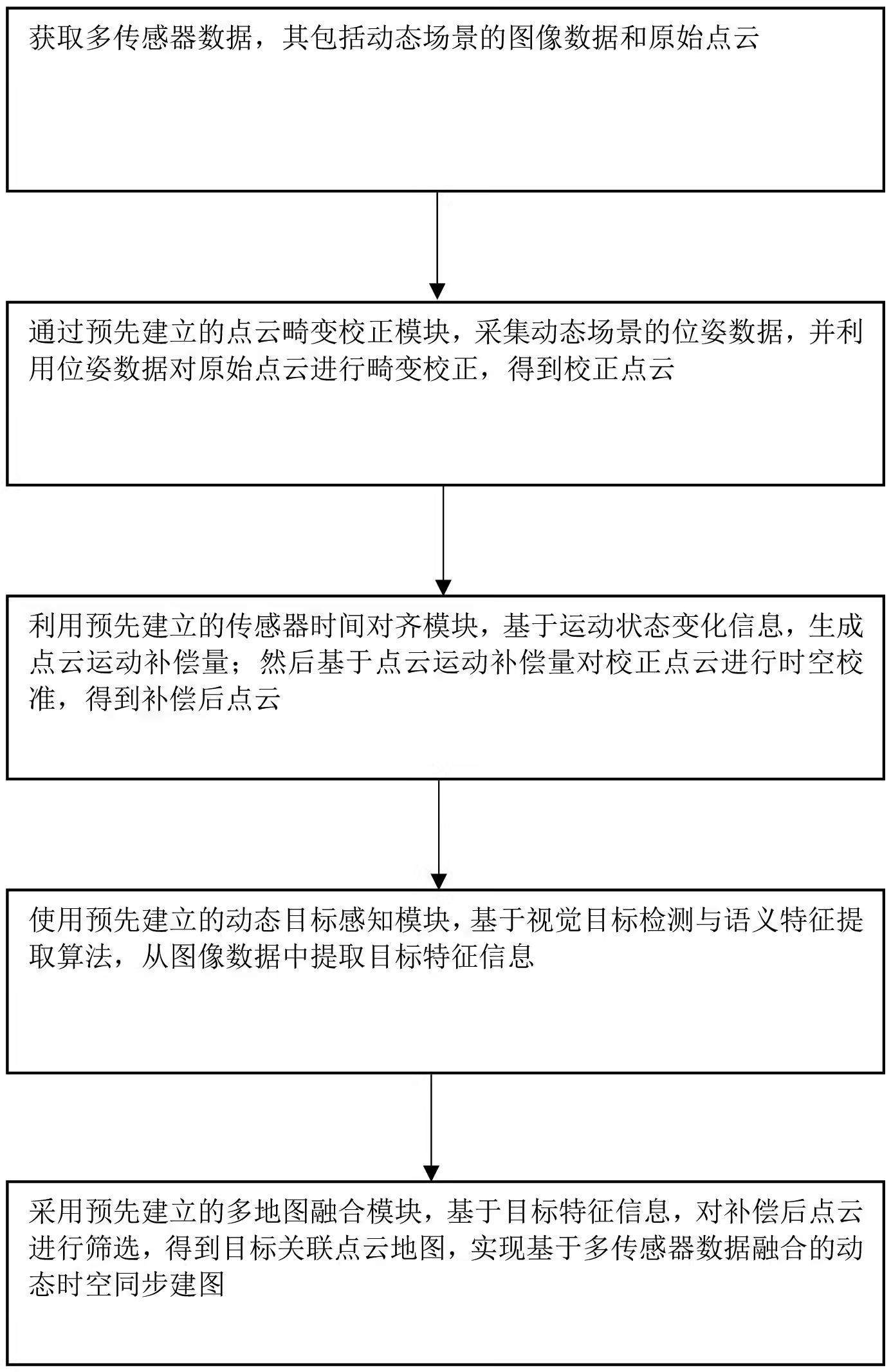
凤凰网科技讯 8月19日,中国专利公布公告网显示,杭州宇树科技有限公司公布了“基于多传感器数据融合的动态时空同步建图方法和系统”专利。 根据专利背景技术介绍,这项发明可解决多传感器融合时的时空同步性不足问题,使得机器人能够对动态目标进行准确识别以及跟踪。此外,有效解决了动态场景下传感器数据时空错位问题,让定位误差降低至厘米级,有效提升时空同步精度。
(责任编辑:刘静 HZ010)
【免责声明】本文仅代表作者本人观点,与和讯网无关。和讯网站对文中陈述、观点判断保持中立,不对所包含内容的准确性、可靠性或完整性提供任何明示或暗示的保证。请读者仅作参考,并请自行承担全部责任。邮箱:news_center@staff.hexun.com |


昨天 23:21
昨天 22:38

昨天 22:37

昨天 22:21

昨天 21:40


热点聚焦 “十五五”规划《纲要草案》: 中共中央政治局常委、国务院总理李
美东时间周一,美股三大指数集体上涨,截至发稿,道指涨0.24%,纳指涨0.57%,标普

每经记者|刘艳美每经编辑|杨欢 澎湃新闻、解放日报消息,在近日召开的2025年度中

每经记者|刘旭强每经编辑|刘艳美 图片来源:中国铁路 高铁第一省,再度易主。 1

周一(12月22日),现货黄金延续强势,北美时段交投4420美元附近,仍处于历史高位区间

每经编辑|黄胜 央视新闻消息,当地时间22日,欧盟委员会发言人就美国任命驻格陵兰

每经记者|肖芮冬每经编辑|赵云 12月22日,市场高开高走,三大指数集体反弹,创业

近日,国产大模型厂商智谱华章(智谱)和稀宇科技(MiniMax)先后通过港交所聆讯

12月22日,三花智控(002050.SZ)公告称,公司发布2025年度业绩预告,预计归属于上

站在2025年年末,观察过去10年各大类资产表现,均在各自周期中轮动。2025年黄金以