|
当雷达探测到一个目标物体却报告存在多个相同目标时,该如何判断哪个才是真实目标?这一雷达信号模糊问题长期困扰着自动驾驶系统,而解决方案在于通过密集采样从源头消除虚假信号。
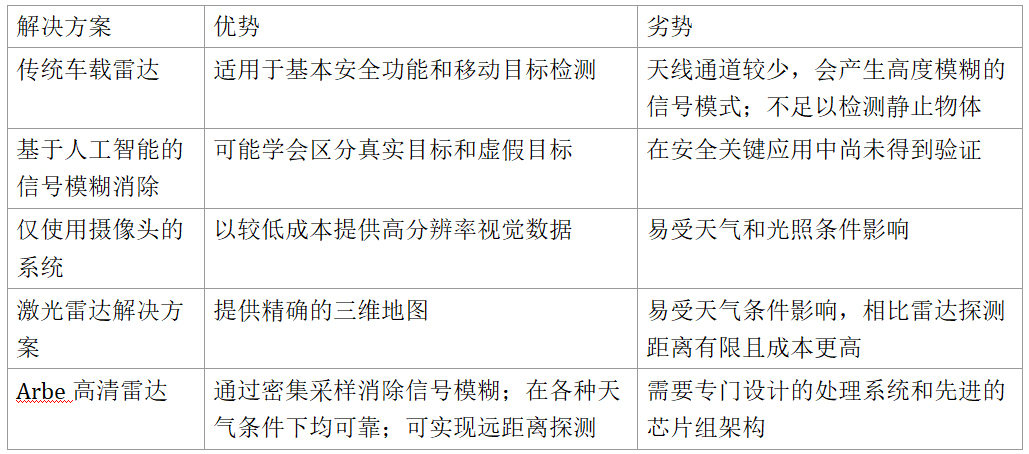
虚假目标问题 当雷达传感器探测到一个目标,却在其视野范围内报告多个功率水平相近的目标时,就会出现雷达信号模糊。想象一下,在雷达前方放置一个物体,系统可能不仅会显示一个清晰的目标,还会显示多个相同的虚假目标以及较弱的虚影。此时,雷达根本无法分辨哪个目标才是真实的。 这种传感器可靠性下降会引发两类问题:多普勒模糊以及方位角和俯仰角模糊。多普勒模糊会影响对移动目标的速度测量,但可通过多次测量解决问题(不过会增加100-150毫秒的延迟)。而方位角和俯仰角模糊则会影响角度方向,这对自动驾驶系统而言是无法解决的难题。 安全影响问题 当无法确信雷达显示的是真实障碍物还是虚影时,自动驾驶的安全基础便会崩塌。方位角和俯仰角模糊会为所有物体生成虚幻目标,但安全故障的表现形式各有不同。对于静止物体,核心问题在于区分相关障碍物与无关背景: 目标混淆:当路面上的备胎和附近的围栏都显示为分散的虚假目标时,系统将无法判断哪个才是真正的道路危险。 隧道盲区:墙壁、天花板和停放的车辆都会产生虚假目标,导致系统无法区分隧道结构与实际阻挡路径的障碍物。 交通模糊:车道上静止的车辆和路边护栏都会产生多个虚假信号,雷达无法确定哪些目标代表阻挡车道的危险。 对于移动物体,虚假目标则会带来不同的计算挑战:一辆真实车辆会显示为多个分散在不同位置的相同目标。系统必须同时追踪所有这些虚假目标的轨迹,并使用复杂算法确定哪条路径可行――这不仅增加了危险延迟,还消耗了大量处理能力。 根本原因在于采样不足 雷达信号模糊源于一个基本原理:奈奎斯特采样定理。就像用帧率过低的摄像机拍摄旋转的螺旋桨会使其看起来反向旋转一样,天线通道稀疏分布的雷达也无法准确确定入射信号的方向。 增加采样密度可以解决问题,但这需要巨大的处理能力和能耗――传统车载系统难以在成本可控的前提下满足这些要求。这构成了经典的工程权衡:采用大量天线通道(性能优良但成本高昂)与采用较少通道(成本低廉但存在信号模糊)之间的矛盾。 行业解决方案与Arbe的技术突破 在认识到导致信号模糊的雷达采样限制后,汽车行业探索了多种方法,但均未找到“万能解决方案”。传统方法主要围绕信号模糊问题展开,包括基于人工智能的滤波技术、采用摄像头和激光雷达等替代传感器技术,或仅接受以基本车载雷达(主要针对移动目标设计)实现有限功能。 Arbe通过两项关键创新直接解决了奈奎斯特采样定理的根本问题:通过大幅提高天线通道密度实现了消除信号模糊所需的密集采样,同时设计了能够处理海量数据(603138)的处理器架构。 Arbe的高清雷达技术采用48个发射通道和48个接收通道――远超传统雷达配置――提供了确定信号到达方向所需的密集空间采样。这种高通道数直接消除了稀疏天线阵列面临的信号模糊问题,但也带来了巨大的处理挑战:每秒30GB的原始射频数据会压垮传统雷达处理器。我们的定制芯片组架构通过将数据压缩为100MB的点云输出解决了这一问题,实现了每帧数千个虚拟通道和数万个检测点,且不会产生影响安全关键应用的延迟。 行业解决雷达信号模糊的方法对比
未来发展方向 实现L3级自动驾驶的关键在于解决信号模糊问题。Arbe通过大幅提高天线通道密度,同时设计能够处理海量数据的处理架构,直接消除了导致信号模糊的根本采样限制,为自动驾驶提供了可靠的感知基础。
【免责声明】此文内容为本网站转载其它媒体或转载企业宣传资讯,仅代表作者个人观点,与本网无关。仅供读者参考,并请自行核实相关内容。 (责任编辑:董萍萍 )
【免责声明】【广告】本文仅代表作者本人观点,与和讯网无关。和讯网站对文中陈述、观点判断保持中立,不对所包含内容的准确性、可靠性或完整性提供任何明示或暗示的保证。请读者仅作参考,并请自行承担全部责任。邮箱:news_center@staff.hexun.com |


1 小时前

1 小时前

1 小时前

1 小时前

1 小时前


电动自行车新国标落地半月有余,围绕其的讨论依然热烈。尽管从1月份标准公布到12月份

在外界屏息静待日本央行年前最后一次议息会议前,高市早苗政府又一次发出了不同声

光刻机行业进展不断。 在美股大幅下挫的背景下,今日(12月18日)上午,A股表

每日期货龙虎榜,带你深度了解市场。 市场一览: 周四商品期货综合指数上

国务院办公厅日前印发《关于全链条打击涉烟违法活动的意见》(以下简称《意见》)

近日,商务部办公厅、财政部办公厅印发《关于做好消费新业态新模式新场景试点有关
每经记者|闫峰峰每经编辑|何建川 各位投资者,大家好。涨跌停板数据,不仅是反映

每经记者|曾子建每经编辑|袁东 12月18日,港股市场大部分时间处于下跌状态,但尾

LG新能源遭遇“空袭”。 12月18日盘中,韩国动力电池龙头企业LG新能源的股价大

12月18日,三大指数涨跌不一,沪指低开回升,创业板指低开低走跌超2%。截至收盘,